Como vimos en el vídeo 1 del artículo 7.1, las instrucciones de montaje del robot espacial dejaba mucho que desear en cuanto a las deficiencias del robustez.
Yo no recomiendo hacer ese modelo en la escuela, pues es muy laborioso y vale para bien poco en nuestro currículo. Luego, también te da pena desmontarlo ya que has perdido dos horas de tu tiempo montándolo.
Yo si recomiendo hacer montajes más simples, probando diferentes módulos y sensores, adaptándalos a lo que queramos enseñar en cada momento.
Bueno, pues ya sin más, os voy a ir comentando algunas fotos (que podeis agrandar picando en ellas) de las dificultades que he encontrado, y cómo las he resuelto.
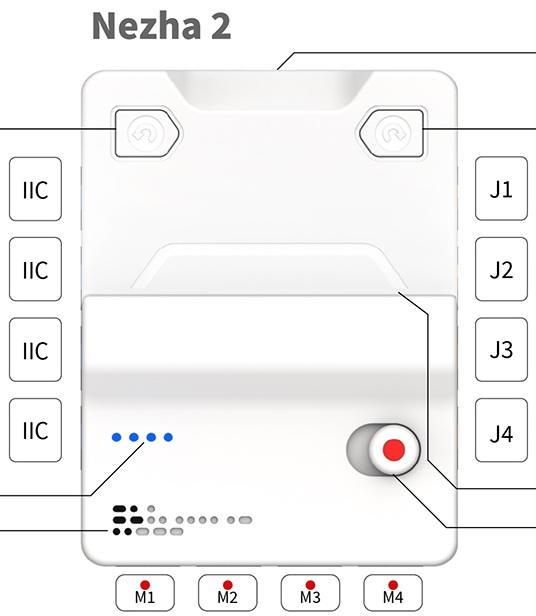
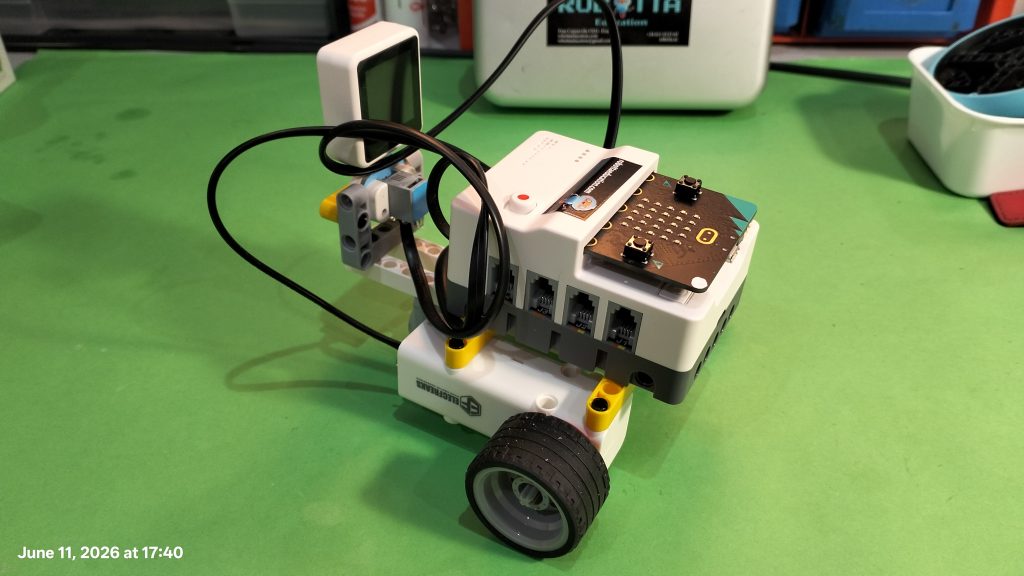
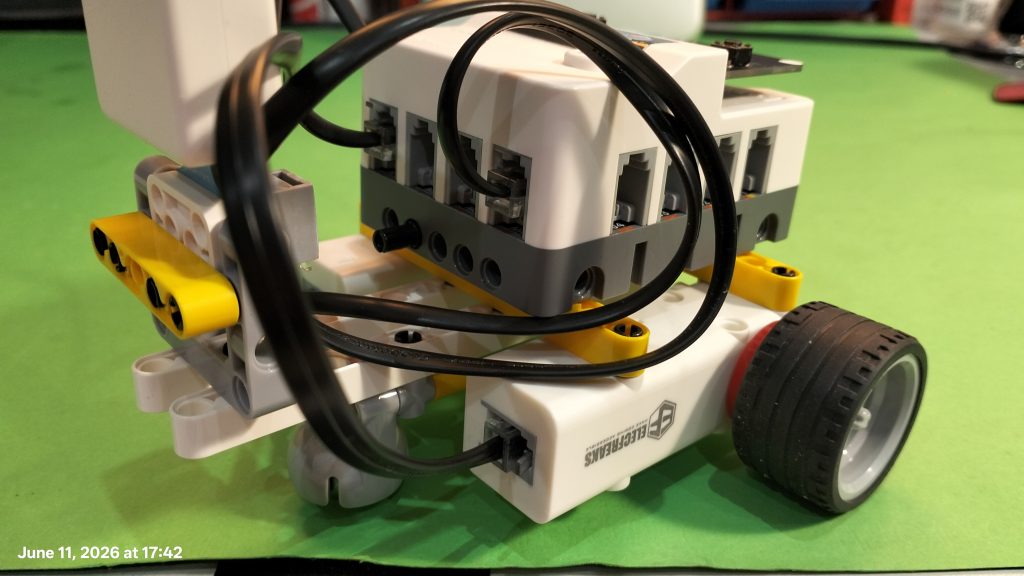
En la Foto 1 vemos una vista general del robot. Es importante que noten que tomaremos la unidad Nezha 2 (Hub o Ladrillo) con la placa Microbit ARRIBA. Esto en importante para que sepan dónde se conectan los cables.
Se aprecia la cámara IA (AI lens) que va delante y que debe ir conectada en los conectores de la izquierda IIC. Foto 2
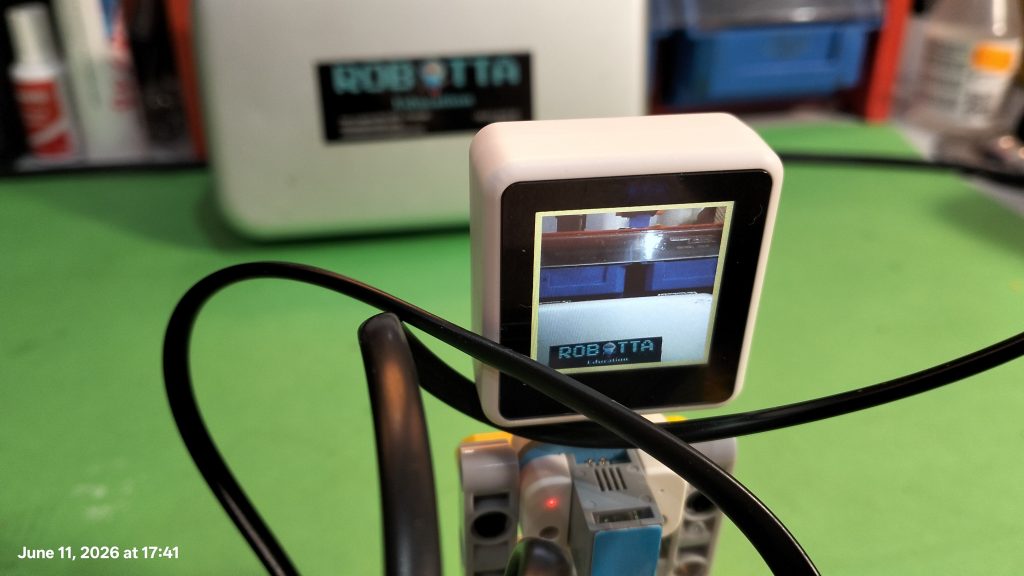
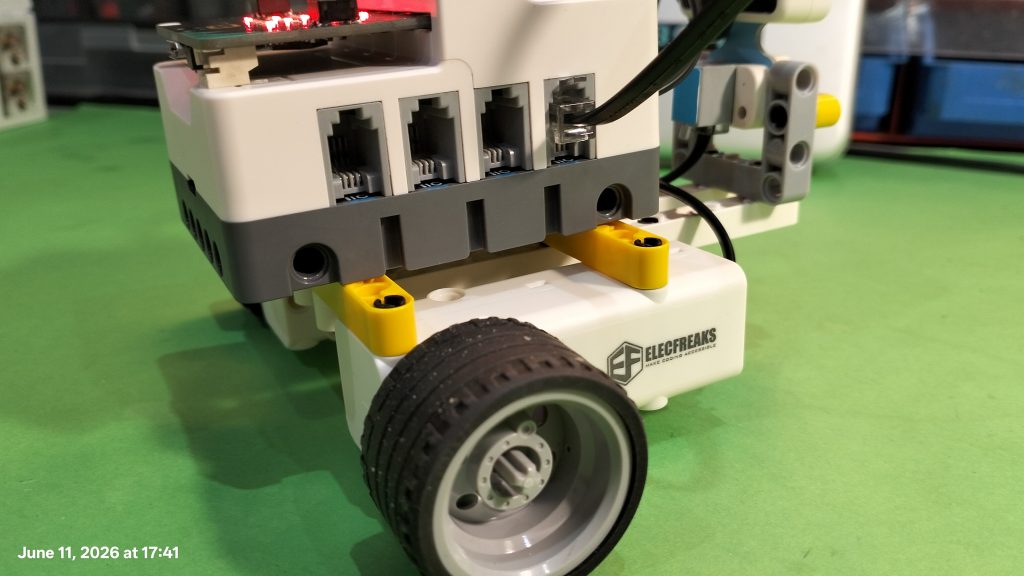
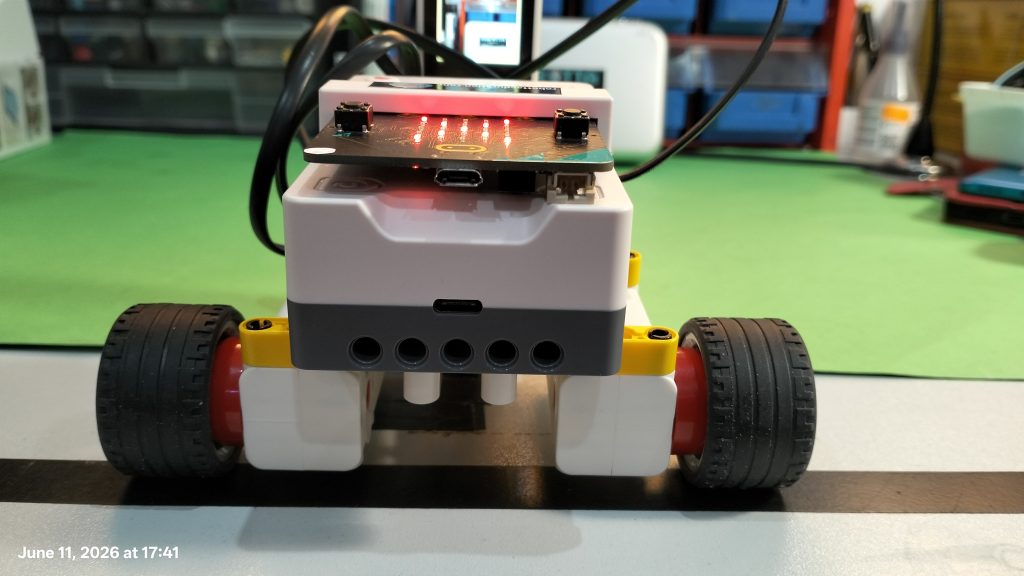
En la Foto 3 vemos un detalle de la pantalla de la cámara. El objetivo está delante. En la Foto 4 vemos que los dos motores debemos conectarlos en los 4 pines de la base. Están correlativos como M1 al M4.
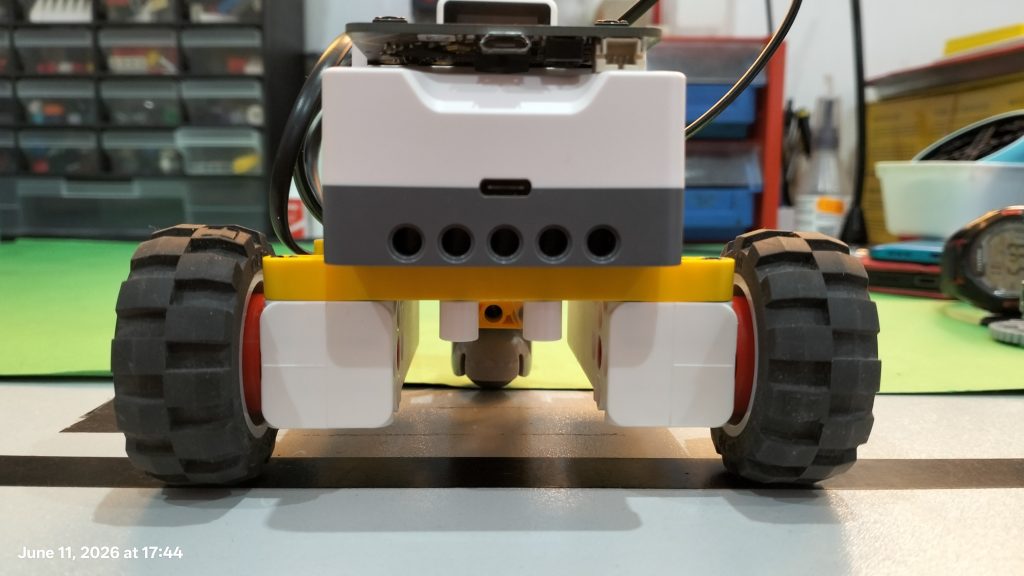
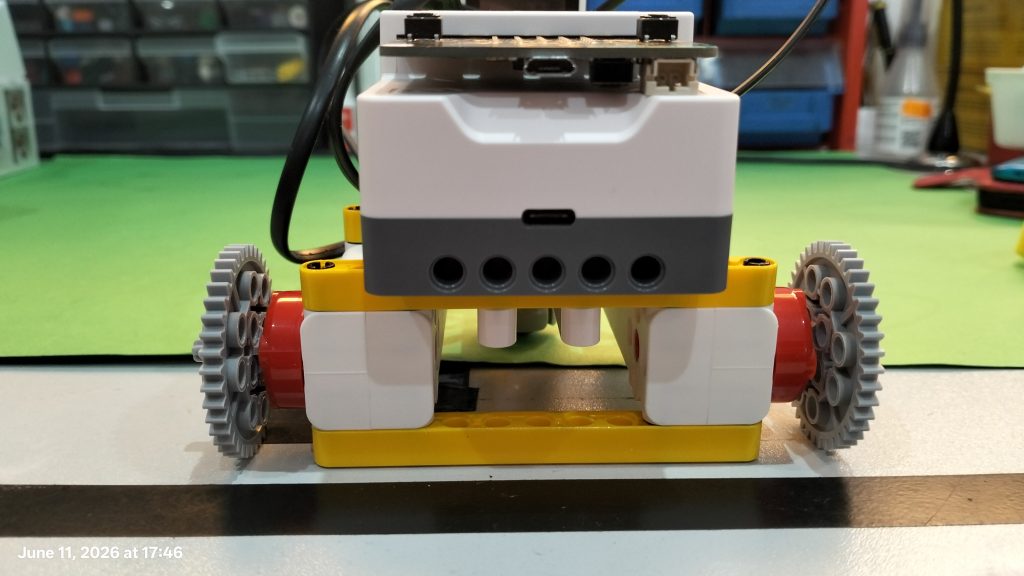
En la Foto 5 se aprecia la poca altura del suelo, ya que las ruedas que trae tienen muy poco diámetro. Esto impide poner otra biga de refuerzo abajo (tampoco es necesaria, pero le da un perfil muy bajo al “vehículo”) En la Foto 6 le hemos puesto unas ruedas de Lego más altas y ya da más juego a la hora de poner accesorios (sobre todo el seguilíneas delante)
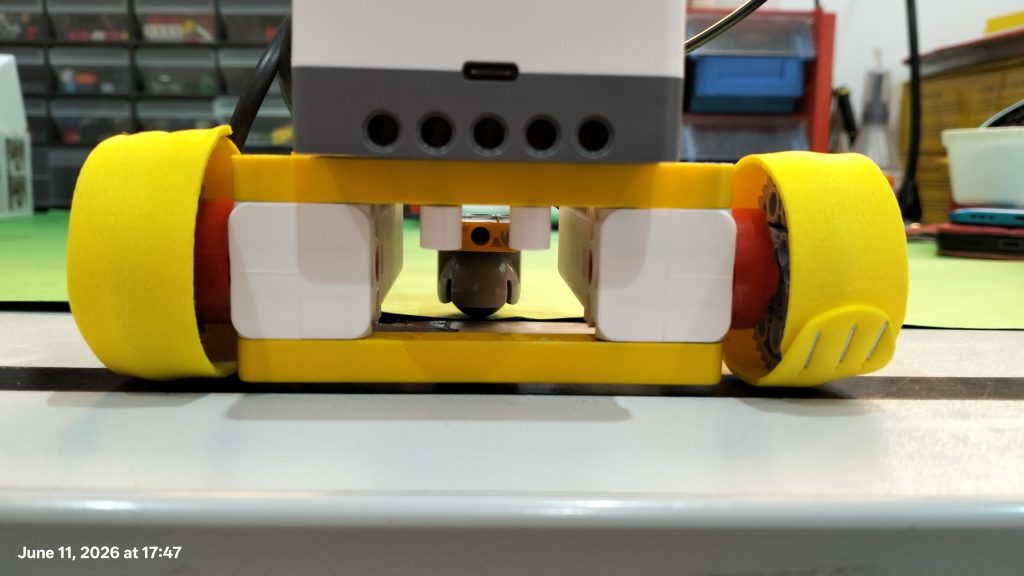
Como no queríamos utilizar ningún elemento extra que no venga en la caja, hemos utilizado para subir el vehículo los engranajes grandes Foto 7. Estos engranajes tienen el problema que al ser de plástico, patinan en ciertas superficies, lo que hemos solventado con tiras de goma eva Foto 8 que nos han dado buenos resultados.
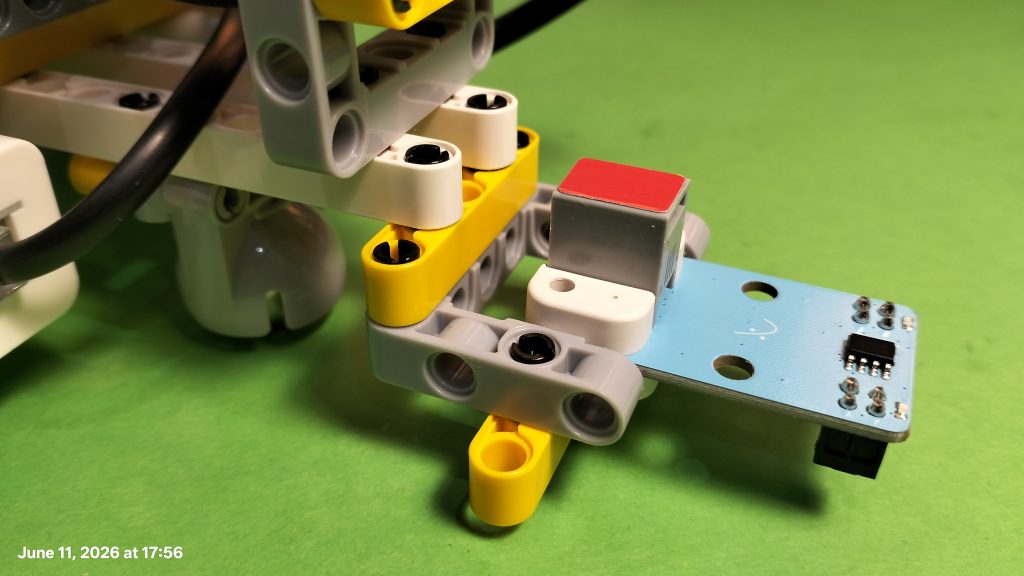
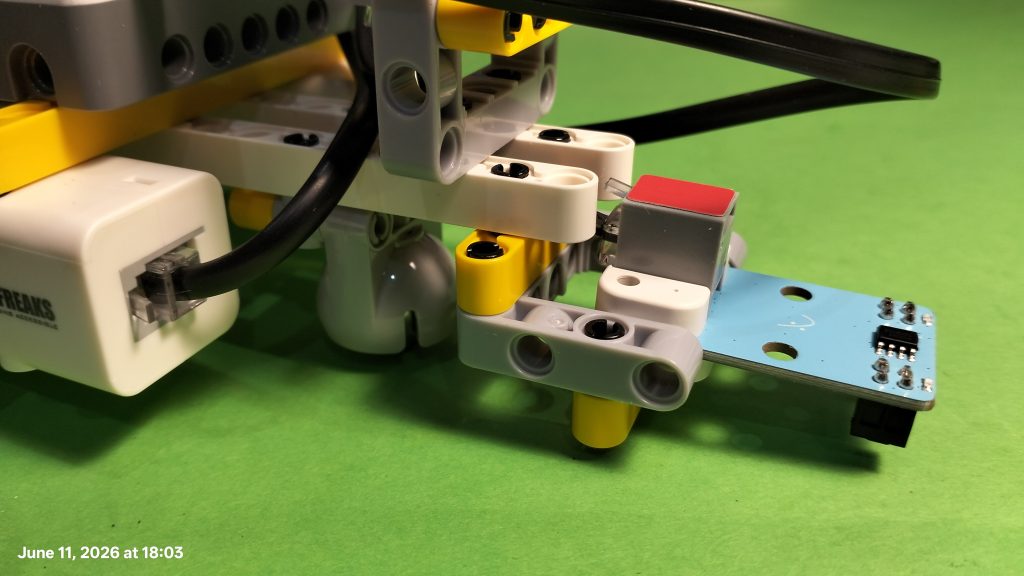
En estas fotos ya se aprecia el montaje del seguilíneas (line tracker). El montaje es algo forzado, ya que no tiene conectores de pines arriba, con lo que hay que conectarlo por abajo obligatoriamente. Como sabemos, el seguilíneas debe ir pegado al suelo, no puede ir a más de 1 cm de este. Se aprecia también el montaje con cel cable en la Foto 10. Los conectores de los sensores tienen colores como este que va de rojo, pero era un código para la Nezha 1, en la Nezha 2 no se tienen en cuenta.